Ze względu na możliwość zastąpienia pracy ręcznej roboty mają szeroki zakres zastosowań. Jako znany producent pierścieni ślizgowych w branży, JINPAT dostarczył niezliczone obrotowe rozwiązania przewodzące dla robotów o różnych funkcjach. W przypadku JINPAT zdecydowana większość tych robotów pierścieni ślizgowych jest stosowana w tradycyjnych robotach przemysłu wytwórczego. Jednak wraz z rozwojem czasu roboty stopniowo były wypuszczane do innych dziedzin i stosowane w innych powstających dziedzinach. Spośród tych nowych zastosowań najbardziej typowym przedstawicielem są roboty chirurgiczne.
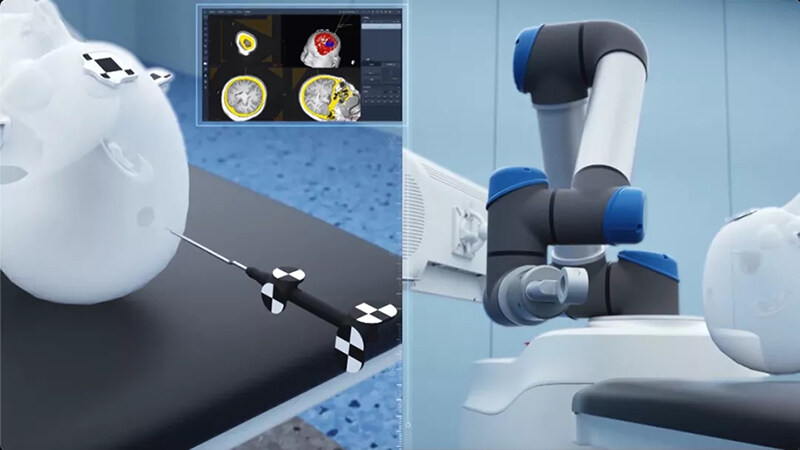
W porównaniu do przemysłu produkcyjnego, w którym roboty muszą wielokrotnie wykonywać pracę o wysokiej intensywności podczas użytkowania, roboty chirurgiczne muszą jedynie pomagać lekarzom w wykonywaniu precyzyjnych operacji w krótkim czasie. Niektóre roboty muszą samodzielnie wykonywać mniej trudne zadania związane z obsługą pacjentów lub specjalnym wykrywaniem chorób, które nie są zbyt intensywne. Obecnie roboty medyczne, które wymagają instalacji pierścieni ślizgowych i zostały już wprowadzone do użytku, w tym zaawansowane roboty do leczenia chirurgicznego układu sercowo-naczyniowego i naczyń mózgowych. Roboty te integrują wideo o wysokiej rozdzielczości i wysoką dokładność operacyjną i mogą szybko pomagać lekarzom w diagnozowaniu chorób i operacjach. Pierścienie ślizgowe wykorzystują odważny produkt kombinowany, który integruje sygnały wideo o wysokiej rozdzielczości 2K lub więcej SDI.
Jako uznany producent pierścieni ślizgowych w branży, JINPAT jest jednym z pierwszych producentów, który skontaktował się i opracował pierścienie ślizgowe dla robotów medycznych. Obecnie JINPAT opracował dziesiątki specjalistycznych pierścieni ślizgowych dla inteligentnych robotów w branży medycznej. Te pierścienie ślizgowe są powszechnie stosowane w robotach do leczenia ortopedycznego, robotach do leczenia endoskopowego oraz robotach sercowo-naczyniowych i mózgowo-naczyniowych, w tym tradycyjnych pierścieniach ślizgowych z kombinacją sygnałów elektrycznych i zintegrowanych pierścieniach ślizgowych optoelektronicznych.
Wraz ze wzrostem inwestycji w dziedzinie robotyki w przemyśle medycznym opracowano wiele nowych robotów o różnych funkcjach. Na przykład robot do leczenia nowotworów opracowany niedawno przez inne firmy integruje różne urządzenia, takie jak sprzęt do leczenia nowotworów i sportowe stoły operacyjne. Dlatego też w całym systemie należy stosować wiele pierścieni przesuwnych. Moduł radioterapii wymaga zintegrowanego pierścienia przesuwnego o wysokiej mocy sygnału impulsowego i mocy lub zintegrowanego pierścienia przesuwnego o wysokiej częstotliwości i mocy. Jeśli stół operacyjny jest wyposażony w funkcję nieskończonego obrotu, konieczne jest dodanie pierścienia przesuwnego, który integruje wiele sygnałów monitorowania parametrów życiowych, aby uzyskać monitorowanie różnych objawów w czasie rzeczywistym podczas procesu leczenia pacjenta.